BreadboardBot
Line follower with an OLED face and an IR proximity sensor

When using a display there is no place for a sonar, but there is space to plug in an IR obstacle avoidance sensor.
-
Wiring
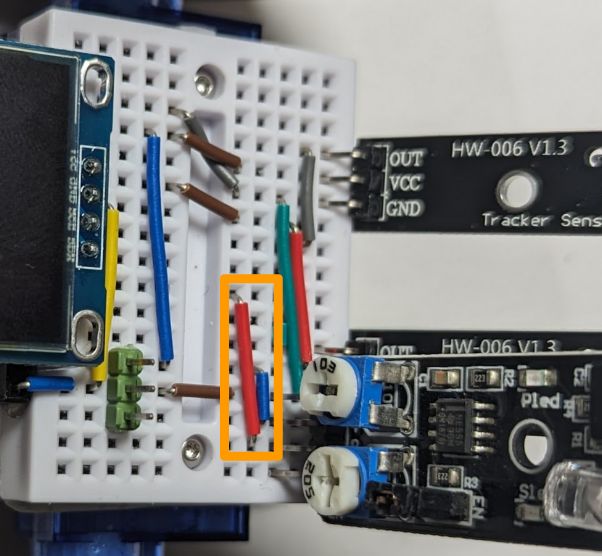
Starting from the line follower with OLED example, connect the IR proximity sensor to GND, 3V3 and D8 using S2 and S6 wires:
-
Programming
Change
code.pyto be justimport ex08_line_follower_oled_ir. -
Result
The resulting robot is a version of the line_follower_sonar example, just with the IR proximity sensor instead of the sonar:
Fun fact: it is not straightforward to film this robot with a smartphone as it turns away as soon as you point your smartphone camera on it - the IR sensor reacts to the IR LED used the smartphone.