BreadboardBot
Remote control via Bluetooth serial (HC05/06)
-
Wiring
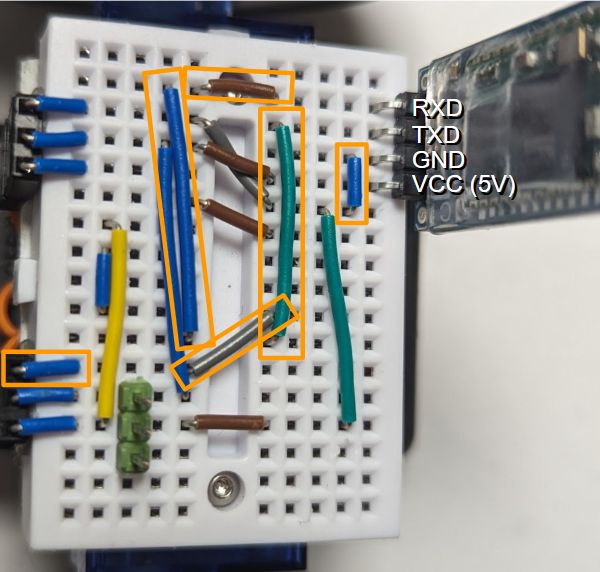
Start from the OLED example and remove all wiring for the line tracker sensors on the right of the breadboard. We would like to use the hardware UART to communicate to the HC06 transceiver, which means we need to connect it to MCU pins D6 & D7. The original assembly wired the right motor’s signal to D6 already - we will need to rewire it to D8 as shown below:
-
Programming
Change
code.pyto be justimport ex09_oled_bt. -
Usage
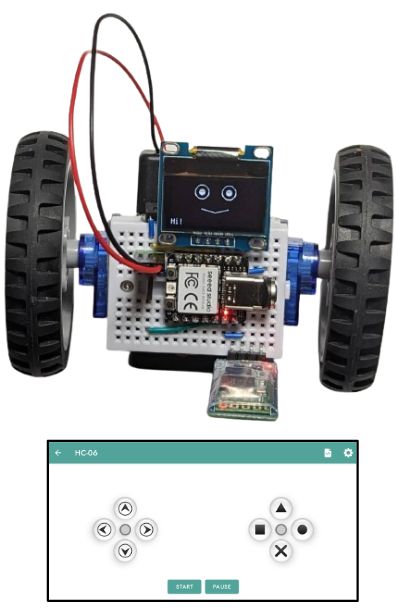
Install the Arduino Bluetooth Controller app, launch it, pair to the
HC-06device, open the “Gamepad” screen, and try steer your robot.Note that there are many “Bluetooth serial controller” apps out there and pretty much any one will do that can be configured to send predefined single-character commands (
Ffor forward button down,Bbackward,Lleft,Rright,0any button up). The example code also controls the eyes via theS(square),C(circle) andT(triangle) buttons.It is easy to modify the code to support any other commands as well.